Investigadores de Carnegie Mellon University y Nvidia desarrollaron un marco de inteligencia artificial denominado «ASAP», diseñado para alinear la física de la simulación con el mundo real y permitir que robots humanoides realicen movimientos ágiles de cuerpo completo. Este enfoque ha sido probado con éxito en el robot Unitree G1, que ahora puede replicar movimientos emblemáticos de atletas como Cristiano Ronaldo, LeBron James y Kobe Bryant.
ASAP se estructura en dos etapas. La primera consiste en preentrenar políticas de seguimiento de movimiento en simulación, utilizando datos ‘retargeteados’ de videos de movimientos humanos. Una vez implementadas en el robot, la segunda etapa recoge datos reales para ajustar un modelo de acción delta, que corrige la discrepancia entre la simulación y la física real.
Las pruebas se llevaron a cabo en múltiples entornos de simulación y en el mundo real con el Unitree G1. Los resultados mostraron grandes mejoras en la agilidad y la precisión del movimiento, reduciendo hasta un 52,7% los errores de seguimiento en comparación con enfoques anteriores como la Identificación de Sistema (SysID) y la Aleatorización de Dominio (DR).
ASAP en la movilidad y coordinación
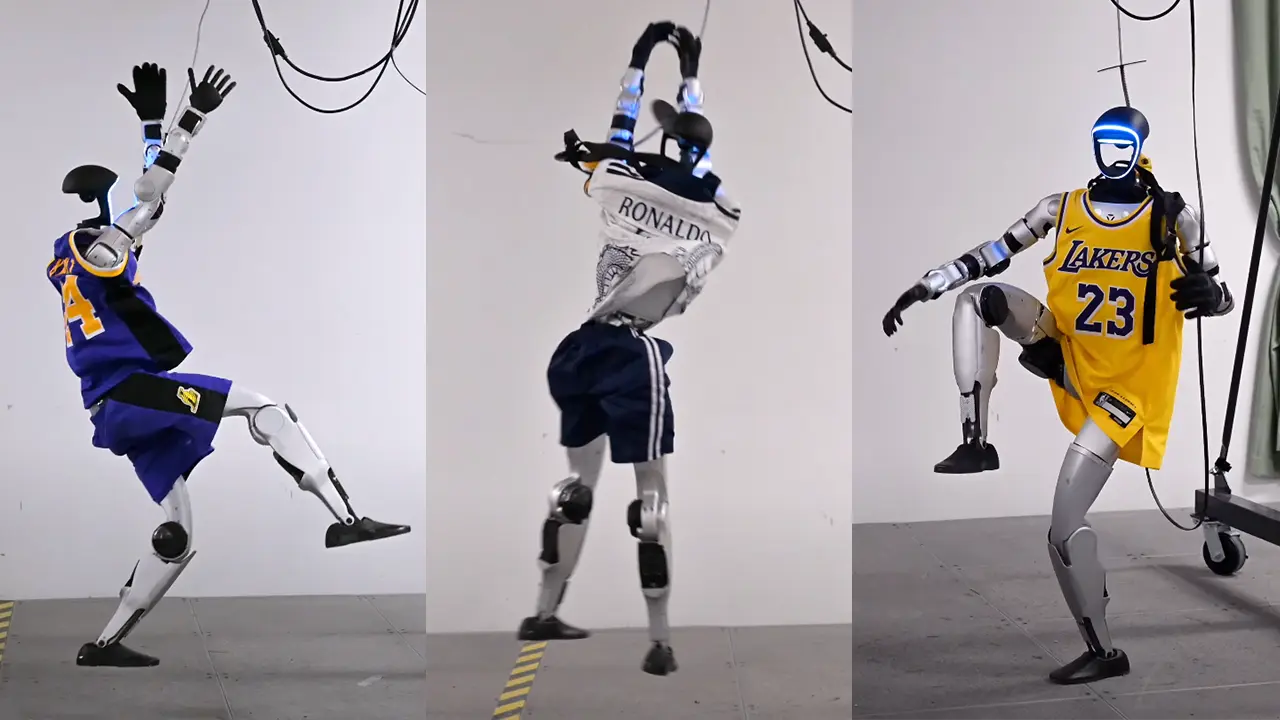
El robot equipado con ASAP logró ejecutar movimientos complejos como el giro aéreo de Cristiano Ronaldo en su celebración «Siu», el equilibrio sobre una pierna de LeBron James en su gesto «Silencer» y el lanzamiento en retroceso característico de Kobe Bryant. Además, pudo realizar saltos laterales de hasta 1,3 metros, estiramientos de piernas, sentadillas e incluso patadas controladas.
Uno de los principales avances de ASAP radica en su capacidad para ajustar el comportamiento del robot a partir de datos reales sin necesidad de modificar manualmente sus parámetros físicos. Esta técnica supera enfoques previos, que a menudo generaban movimientos demasiado conservadores o inestables.
Los investigadores consideran que futuras mejoras incluirán sistemas de control más inteligentes que reduzcan la necesidad de captura de movimiento y optimicen la adaptación con menos datos de entrenamiento. Por ahora puedes leer el trabajo completo que ya fue publicado en arXiv.








